اختراعی که «مرد عنکبوتی» را بیاعتبار میکند!
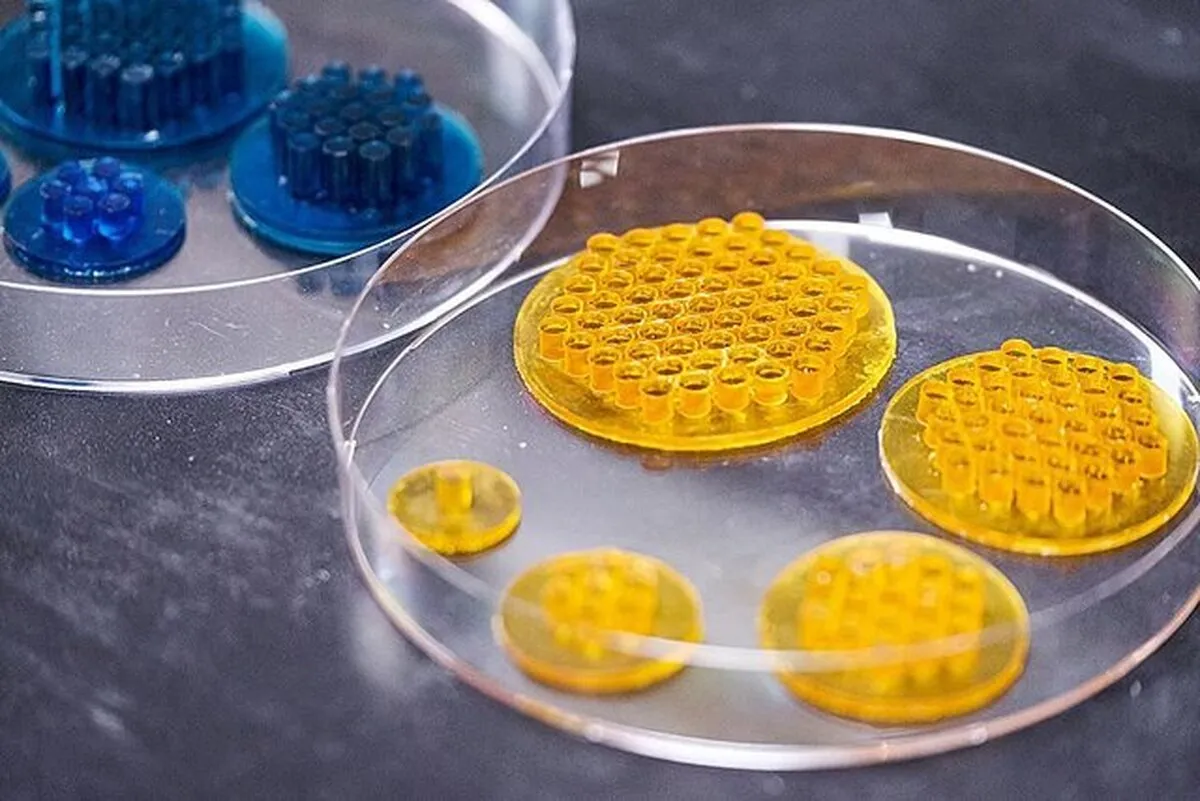
مخاطب ۲۴- این پلیمر که اپوکسی E۴۴ نامیده میشود و در دمای اتاق یک پلاستیک سخت و شیشهای است، پس از گرم شدن، شکلی نرم و لاستیکی به خود میگیرد. در این حالت، میتواند به شکافهای سطوح دیگر نفوذ کند و اگر در همان حال سرد شود، پیوندهای بسیار قوی ایجاد میکند. برای جدا کردن آن تنها کاری که باید انجام دهید، این است که دوباره آن را گرم کنید.
به نقل از نیواطلس، در آزمایشهایی که توسط دانشمندان دانشگاه فناوری نانیانگ (NTU) سنگاپور انجام شد، این چسب توانست بر روی طیف وسیعی از بافتهای مختلف بچسبد و هیچ اثر چسبندهای از خود بر جای نگذارد. از طریق آزمایش، محققان دریافتند که بهترین شکل برای این ماده، مجموعهای از ساختارهای مو مانند به نام فیبریل است که هر کدام چند میلیمتر عرض دارند.
به عنوان مثال، در یکی از دستگاهها از فیبریلهایی با سطح مقطع ۱۹.۶ میلیمتر مربع (۰.۰۳ اینچ) استفاده شد که هر کدام میتوانند تا ۱.۵۶ کیلوگرم (۳.۴ پوند) را تحمل کنند. افزودن فیبریلهای بیشتر، حداکثر وزنی را که ماده میتواند تحمل کند، افزایش میدهد.
پروفسور جیمی هسیا (Jimmy Hsia)، نویسنده اصلی این مطالعه، میگوید: این فناوری برای دستگیرههای چسبنده و رباتهای کوهنوردی بسیار مفید خواهد بود و ممکن است روزی به انسانها اجازه دهد مانند یک مرد عنکبوتی واقعی از دیوارها بالا بروند.
با این حال هنوز برای مرد عنکبوتی شدن زود است. این چسب حافظهدار کاملا آماده نیست. برای شروع، این چسب باید تا ۶۰ درجه سانتیگراد حرارت داده شود تا از سطح جدا شود که رسیدن به آن دما با استفاده از سشوار یک دقیقه طول میکشد. پس از فشرده شدن روی سطح، حدود سه دقیقه طول میکشد تا آنقدر خنک شود که در جای خود قفل شود. این دما و سرعت عمل برای بسیاری از کاربردها مناسب نیست، اگرچه ممکن است برای مصارف صنعتی مانند گیرههای رباتیک که بارهای سنگین را حمل میکنند، کار کند، اما محققان میگوید که با کار بیشتر میتوان این محرکها را تغییر داد.
دکتر لینگهو چانگهونگ (Linghu Changhong)، نویسنده اول این مطالعه میگوید: یافتههای ما نشان میدهد که کاهش زمان انتظار تا چندین ثانیه امکانپذیر است و دما را میتوان به دمای نزدیک بدن کاهش داد که به طور چشمگیری امکان استفاده از آن در شرایط مختلف را ممکن میکند. محرکهای تغییر ماده از یک حالت به حالت دیگر نیز میتواند متفاوت باشد، مانند استفاده از جریان الکتریکی یا نور به جای دما.
در نهایت، محققان میگویند که این روش میتواند برای ساخت رباتهایی که میتوانند از سطوح بالا بروند یا برای وسایل بالا رفتن مانند دستکش و چکمه برای انسان استفاده شود.